
Dans la continuité des récentes annonces sur le projet de voiture OpenRC, nous allons aborder aujourd’hui ensemble un type de capteur qui devra nous intéresser dans un futur proche. En effet, nous allons découvrir ensemble le capteur « YDLidar X4 » que propose la compagnie homonyme YDLidar.
Cet article n’est bien évidemment pas sponsorisé et nous sommes donc libre de chacun des mots que nous emploierons. Vous comprendrez rapidement ce qui nous a poussé à choisir ce capteur pour notre utilisation.
Nous aborderons en particulier les points suivants:
- Introduction aux capteurs Lidar
- Aspect externe du YDLidar X4
- Performances du modèle
- Comparaison avec d’autres modèles du fabricant
Introduction aux capteurs Lidar
Appelée « télédétection par laser » ou, plus communément « Lidar » de son acronyme anglais, cette typologie de capteur est de plus en plus abordée dans le développement des véhicules autonomes (terrestre, maritimes ou aérien). Néanmoins, c’est également un type de capteur largement répandu dans l’industrie, notamment pour la surveillance de périmètres.
La technologie Lidar, pour « Laser imaging detection and ranging », se base en fait sur l’effet Doppler que l’on connait surtout pour son utilisation dans les radars routiers.
L'effet Doppler indique que, lorsque l'émetteur d'une onde sonore ou lumineuse est en déplacement à une vitesse donnée, alors la vitesse de cette onde dans une direction donnée est liée à l'angle que fait cette onde avec le vecteur d'avance de l'émetteur. Plus concrètement, si l'émetteur est en mouvement vers vous et émet un son continu, vous entendre un son plus aigu que lorsqu'il s'éloignera de vous. C'est l'effet de la "compression" des arcs de cercle de l'onde sonore.
Précisons que l’effet Doppler, du nom du scientifique qui l’aura mis en évidence, est régulièrement associé à celui de Fizeau qui a également porté une partie de ses travaux sur l’application des principes énoncés par Doppler sur le son aux ondes lumineuses si l’on considère alors la lumière comme telle.
La capteur Lidar utilise donc cette technologie sur certain des modèles qui l’emploie. C’est en fait un moyen détourné de mesurer le temps de vol de la lumière entre le point émetteur et le point visé. Le temps de vol de la lumière pour une distance de 2m se calcule facilement:
v=\frac{d}{t} \iff t=\frac{d}{v} \rightarrow t=\frac{2}{300 000 * 1000} = 6,666 .10^{-10}ssoit 0.1ns. A moins d’avoir chez vous une horloge atomique, nous aurons du mal à mesurer ce temps de manière suffisamment fiable pour gagner une précision au millimètre. L’effet Doppler-Fizeau permet donc de mesurer cette durée de manière détournée.
L’idée est ensuite de procéder à cette mesure tout au long de la rotation de l’ensemble émetteur/récepteur et de caractériser donc les distances aux points situés sur un périmètres circulaire. On caractérise donc généralement un Lidar par 3 valeurs:
- Sa distance maximale de détection
- Sa fréquence de rafraichissement (combien de points par degré ou par tour)
- Son ouverture angulaire de mesure (bien que généralement de 360°, elle est parfois réduite sur des capteurs industriels)
Nous reviendrons donc sur ces trois données dans la suite de notre article.
Aspect externe du YDLidar X4



D’un point de vue général, le Lidar proposé par YDLidar prend la forme d’une goutte d’eau vue de dessus avec des dimensions de l’ordre de 100mm par 70mm. Il est composé de deux parties principales, comme souvent sur du lidar plan, avec une première partie fixe montée sur entretoises et une partie rotative, bleu sur les photos, avec les deux orifices émission/réception LASER.
Les entretoises sont au pas de 3mm et permettent un montage aisé du Lidar sur un système quelconque.
Côté performance, le X4 permet une scrutation jusqu’à 10m et à partir de 12cm. Sa résolution angulaire est variable, entre 0.48° et 0.52°, sur une rotation de 360° bien sûr. En terme de précision, il se place à 0.5mm pour une distance inférieure à 2m et 10% de la distance pour toute mesure supérieure à 2m. A 10m, on se trouve donc avec une erreur potentielle de 10cm. Non négligeable mais notons le prix de ce capteur que l’on peut retrouver aux alentours de 90€ dans le commerce.
Composition interne du capteur
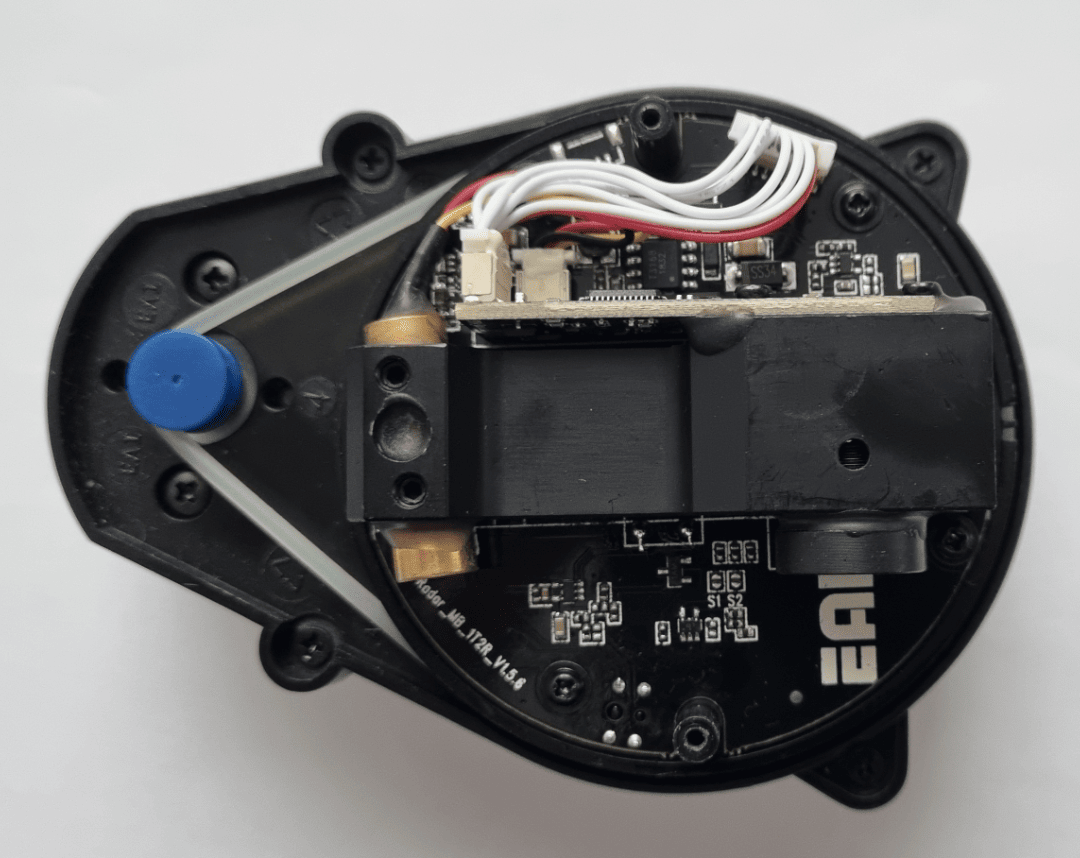


En démontant le capot supérieur de la partie mobile, on trouve bien évidemment l’ensemble émission/réception LASER avec, sur l’image principale, en couleur laiton/jaune l’émetteur LASER et à droite le récepteur avec sa lentille de collimation. En ensemble d’électronique d’interface est également présent à cet étage ainsi qu’à l’étage inférieur, fixe quant à lui.
On trouve également une carte d’interfaçage qui se connecte sur le port de connexion présenté en aspect extérieur. Enfin, on peut noter la présence du roulement au centre de la partie fixe.
A propos de l’étage fixe, on remarque également la présence de deux leds au centre du roulement. On peut alors effectivement s’interroger de faire dialoguer une partie fixe et une partie en rotation entres elles. Pour cela, YDLidar a fait le choix d’utiliser une technologie inductive pour la transmission de puissance et un échange de données via lumière au moyen de leds et de capteurs de luminosité.

Par ailleurs, sur la photo ci-dessus, on remarque également la présence d’une fourche optique permettant de définir le zéro de rotation du capteur et donc de recaler les données en position angulaires.
Enfin, une dernière image en gros plan sur la partie émission/réception LASER:

Conclusion
S’il y a bien une conclusion à tirer de l’analyse de ce capteur, c’est que d’une part, sa qualité de manufacture est tout à fait raisonnable étant donné le coût d’achat (90€ pour rappel) et que d’autres part, les performances sont largement au rendez-vous pour un projet « Maker ». En effet, avec une précision angulaire de 0.49°, on se retrouve à pouvoir détecter des objets de l’ordre de 8cm à 10m de distance, si l’on ramène cela à des distances plus raisonnable de l’ordre du mètre, on tombe à 0.8cm mini de détection.
En bref, ce capteur nous permettra de notre côté d’avancer sur le projet initié de voiture autonome, un bon plan donc !